
WAR MACHINE - Autonomous humanoid robot
PROJECTS
7/1/20252 min read
Vision Statement
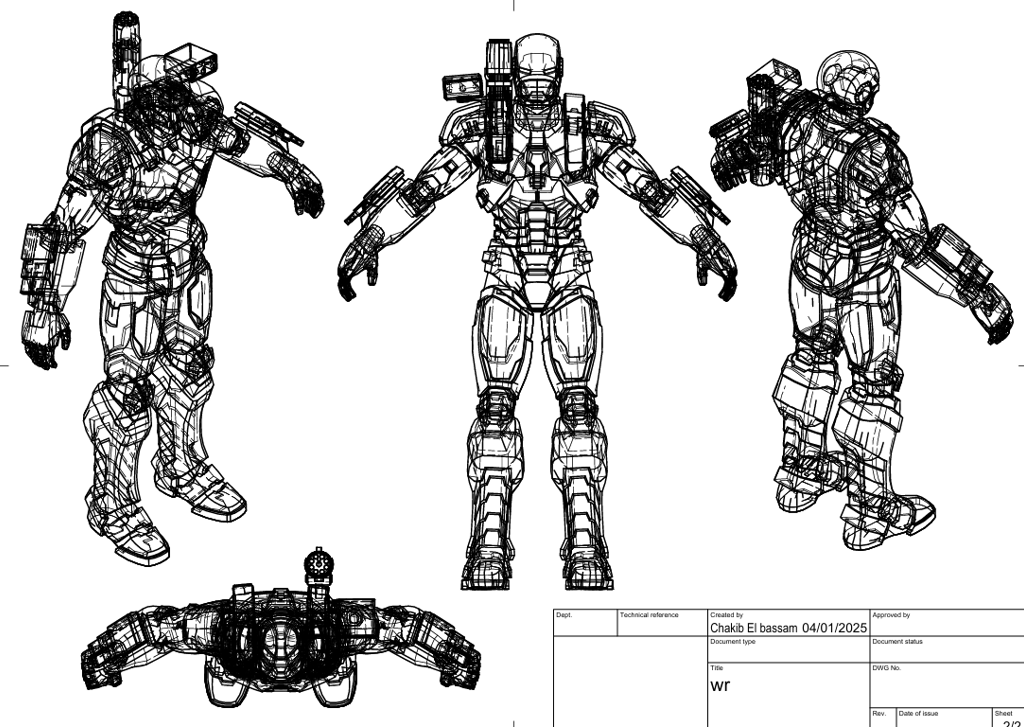
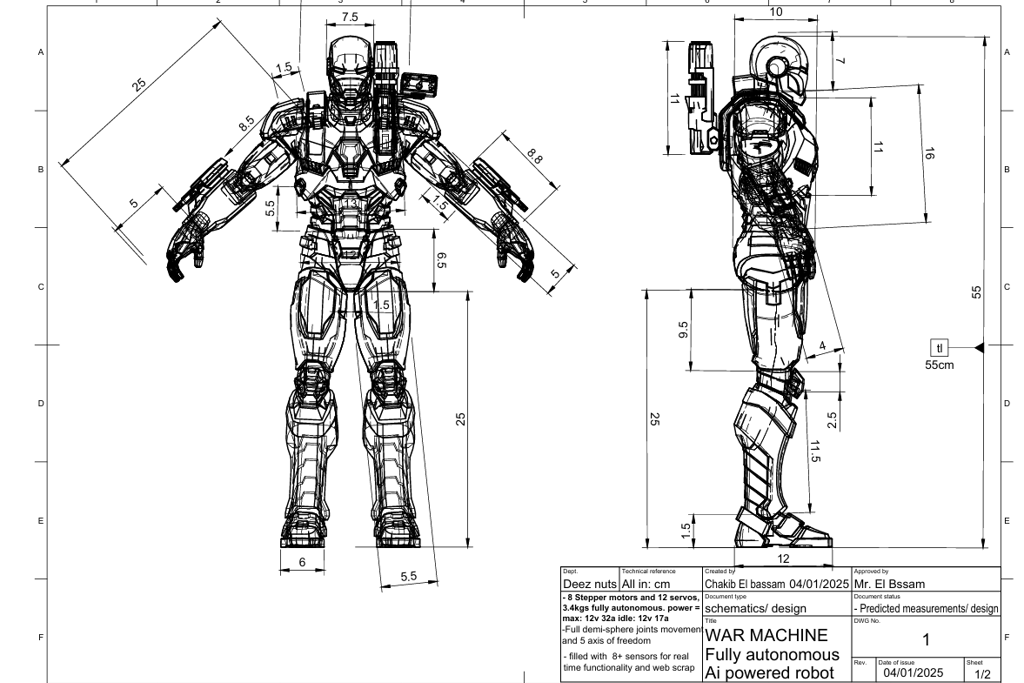
Meet War Machine, a compact humanoid robot designed to have a commanding presence. Originally designed at 55 cm tall, the robot will be upgraded to 1 meter in height. Weighing 5-6 kg (will increase proportionally with height upgrade), this robot navigates spaces, maps obstacles, and responds to visual input. It can speak, understand simple commands, and perform various movements including walking, running, push-ups, light boxing drills, and dance routines. The "armaments" are theatrical effects only—lights, sounds, and motion props for entertainment, not harm. The goal is a confident, expressive robot combining performance, utility, and safety.
System Specifications
Physical Specifications
Current Height: 55 cm (upgrading to 1 meter)
Current Weight: 5.5-6.0 kg target mass
Form Factor: Modular design (hip/abs/chest torso, single arm + head)
Actuation System
Hip
Servo Type: 40 kg-class servo
Gear Reduction: 2:1
Available Torque: ~7.8 N·m
Knee
Servo Type: MG996R
Gear Reduction: 8-12:1 (harmonic/gear)
Available Torque: 10-12 N·m
Shoulder
Servo Type: MG996R
Gear Reduction: 2:1
Available Torque: 4-7.8 N·m
Elbow
Servo Type: MG996R
Gear Reduction: 1.5:1
Available Torque: ~1.5 N·m
Wrist
Servo Type: 9g servo
Gear Reduction: Direct drive
Available Torque: N/A
Computing & Control
Main Processor: NVIDIA Jetson Nano
Real-time Control: Dedicated microcontroller stack (1 kHz joint PID)
Sensors: IMU, ToF/LiDAR, camera, current/voltage monitoring, bump sensors
Communication: I2C/SPI bus with watchdog protection
Power System
Battery: 3S 18650 pack (12-18 cells)
Capacity: 10-15 Ah equivalent
Design: Hot-swappable sled configuration
Protection: Fused rails with per-group current limiting
Performance Metrics
Walking Speed: 0.2-0.25 m/s
Payload Capacity: 300g at 20cm reach
Duty Cycle Example:
10m walk (~40s) + pick 300g + 10m return (~40s) = ~90s total
Power consumption: ~75 mAh per cycle at ~3A average
Runtime Estimates
Standby Mode: 10-20 hours
Moderate Use: 4-7 hours
Heavy Use: 2.5-3.5 hours
Mechanical Architecture
Dimensions (Current 55cm Design)
Leg Segments: ~25 cm each
Hip Block: 6.5 × 12 × 7 cm
Abs Section: 5.5 × 12 × 8 cm (battery housing)
Chest: 11 × 13 × 10 cm (compute & power distribution)
Arm Reach: ~25 cm total
Head: 7 × 7 cm (camera & pan/tilt mount)
Materials
3D-printed PETG/ABS components
Aluminum standoffs for structural support
Steel inserts at high-stress points
Safety Features
Current limiting on all power rails
Soft-start motor control
Emergency stop loop
Software-enforced joint travel limits
"Limp" mode for safe power-down
Staged torque ramping
Brownout recovery protection
Interaction Capabilities
Autonomous Mode: Navigate, locate objects via fiducials, pick/place operations
Teleoperation: WiFi-based web UI for remote control
Scripted Routines: YAML-based skill chaining (stand, wave, pick, place)
Safety Override: Automatic fault detection triggers limp mode
Current Progress
Completed
Lower-torso frame assembly
Functional prototype arm
Gear test rigs and dimensioned drawings
Power distribution board with fused rails
Basic joint PID control with slew limiting
Teleop sandbox environment
Next Steps
Complete Leg v1 assembly with stance controller tuning
Finalize battery sled v1 (12-cell configuration)
Implement gait control on flat surfaces
Integrate arm with pick-place functionality
Harden safety systems (e-stop, watchdogs, fault recovery)
Future Goals
Two-arm configuration for coordinated manipulation
Vision-guided picking using AprilTags/fiducials
Voice and gesture control interface
Enhanced obstacle avoidance
Technical Notes
Torque calculations verified: Hip requires ~6 N·m (2.5 kg leg at 0.25m lever arm)
Knee torque: ~4 N·m requirement, 10-12 N·m available (comfortable margin)
Shoulder manipulation: 0.6 N·m needed for 300g at 20cm (well within capacity)
Note: All specifications above are for the current 55cm design. The 1-meter upgrade will require proportional scaling of torque requirements, power systems, and structural components.
Connect
Explore innovative AI solutions to grow your business today.
Feel more than welcomed to contact me on any platform.
Subscribe to get the latest news/deals
© 2025. All rights reserved.

Privacy Policies